
HMS Industrial Networks: 안정적인 모바일 로봇 구동을 위한 해결 방안
모바일 로봇 제조업체들이 직면한 통신 및 안전 문제.

모바일 로봇은 웨어하우스에서 병원, 심지어 거리에 이르기까지 우리 주변의 모든 곳에 존재하고 있다. 모바일 로봇이 확산되는 이유는 실제 작업자보다 경제적이고, 안전하며, 보다 용이한 위치파악 및 높은 생산성 등의 장점 때문이다. 또한 다른 시스템과도 쉽게 결합하거나 확장할 수 있다. 이외에도 기업들은 많은 실시간 데이터를 수집하는 모바일 로봇을 활용하여 IIoT 여정을 시작할 수도 있다.
이러한 모바일 로봇의 효율적인 작업을 위해서는 안전하고, 신뢰할 수 있는 통신이 필요하다. 이 글에서 모바일 로봇 제조업체들이 직면하고 있는 주요 통신 및 안전 문제를 개략적으로 살펴보고, 이러한 문제를 극복하여 모바일 로봇을 지속적으로 구동할 수 있는 간단한 방법은 무엇인지 알아보도록 하겠다.
모바일 로봇은 무엇인가?
한 지점에서 다른 곳으로 자재를 운반하는 모바일 로봇은 AGV(Automated Guided Vehicle)와 AMR(Autonomous Mobile Robot) 등 두 가지 유형으로 제공되고 있다. AGV는 가이드 인프라(유선 반사기, 반사기 또는 마그네틱 스트립)를 사용하여 미리 결정된 경로를 따라 이동한다. 객체가 AGV의 경로를 차단하면, AGV는 이동을 멈추고 객체가 제거될 때까지 기다린다.
AMR은 보다 역동적이다. 이 로봇은 지도를 탐색하고, 카메라와 내장된 센서 또는 레이저 스캐너의 데이터를 사용하여 주변을 감지하여 가장 효율적인 경로를 선택한다. 객체가 AMR의 계획된 경로를 차단하면, 다른 경로를 선택한다. AMR은 가이드 인프라에 의존하지 않기 때문에 보다 신속하게 설치가 가능하고, 물류 변화에 적응할 수 있다.
모바일 로봇 제조업체들이 직면하고 있는 통신 및 안전 문제는 무엇인가?
1. 무선 연결 설정
모바일 로봇 제조업체의 첫 번째 과제는 가장 적합한 무선 기술을 선택하는 것이다. 일반적으로는 요구사항을 결정하고, 표준을 평가하여 가장 적합한 것을 선택하는 것이 좋다. 하지만 모바일 로봇 제조업체는 로봇이 사용되는 장소나 대상 애플리케이션의 세부 정보를 정확히 파악하기 어렵기 때문에 이러한 과정이 항상 가능한 것은 아니다.
경우에 따라, 혼잡하지 않은 안정적인 연결을 위해 블루투스 연결이 이상적일 수도 있지만, 다른 애플리케이션에서는 고속의 안전한 셀룰러 연결이 필요할 수 있다. 이러한 모바일 로봇 제조업체들에게 중요한 것은 특정 요구사항을 충족할 수 있도록 손쉽게 변경이 가능한 네트워킹 기술을 보유하는 것이다.
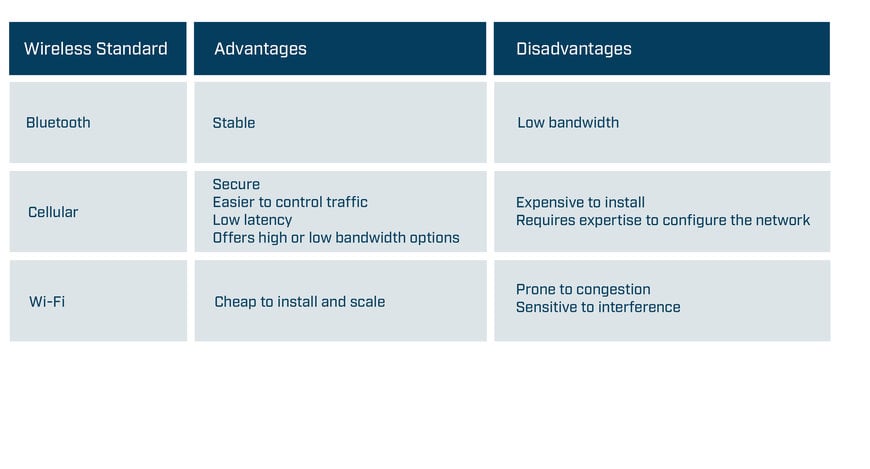
주요 무선 표준의 장점과 단점
두 번째 과제는 해당 설비가 계획대로 동작하도록 하는 것이다. 무선 솔루션을 설치하기 전에 시설 도면을 기반으로 현장 예측 조사를 실시하여 모바일 로봇이 해당 장소 전반에 걸쳐 충분한 신호 커버리지를 갖도록 해야 한다. 현장 조사에서 최적의 액세스 포인트 위치, 올바른 안테나 유형, 최적의 안테나 각도 및 간섭 완화 방법 등을 확인해야 한다. 설치 후에는 무선 스니퍼(Sniffer) 툴을 사용하여 설계를 확인하고, 필요에 따라 AP 또는 안테나를 조정한다.
2. 산업용 네트워크에 모바일 로봇 연결
이와 함께 모바일 로봇 제조업체는 모바일 로봇이 필요한 규모의 데이터를 처리할 수 있는 충분한 성능을 갖추도록 해야 한다. 필요한 데이터 규모는 설비의 크기 및 유형에 따라 달라질 수 있다. 대규모 시설의 경우, 경로 알고리즘은 더 넓은 영역과 더 많은 로봇 및 여러 잠재적 경로를 처리해야 하기 때문에 더 많은 데이터를 사용할 수 있다. 비전 내비게이션과 같은 내비게이션 시스템은 이미지를 처리해야 하기 때문에 반사기와 같은 다른 내비게이션 시스템을 이용하는 설비보다 더 뛰어난 프로세싱 성능이 필요하다. 따라서 모바일 로봇 제조업체는 다음과 같은 문제를 해결해야 한다:
- 모든 주요 필드버스 및 산업용 이더넷 네트워크를 지원하는 네트워킹 기술이 필요하다.
- 하드웨어 설계를 변경하지 않고도 모바일 로봇이 컨트롤러와 동일한 산업용 네트워크와 통신할 수 있도록 네트워킹 기술을 쉽게 변경할 수 있어야 한다.
- 네트워킹 기술은 필요한 규모의 데이터를 처리할 수 있는 충분한 기능과 성능을 갖추고 있어야 한다.
3. 안전한 시스템 구축
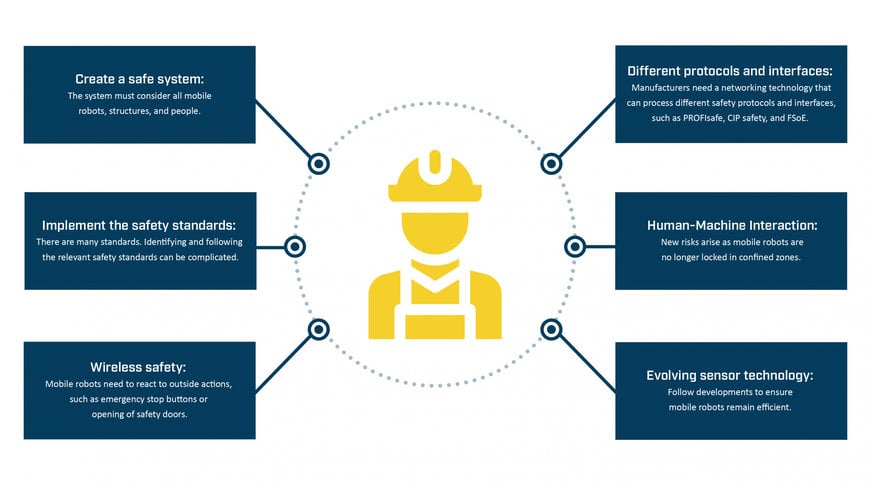
일반적인 모바일 로봇 제조업체의 안전 문제
안전 표준
다양한 안전 표준(ISO, DIN, IEC, ANSI 등)을 준수하는 것은 대부분은 자발적이지만, 유럽연합의 머신빌더들은 법적으로 기계류 지침의 안전 표준을 준수해야 한다. 기계류 지침 2006/42/EC는 모바일 로봇 제조업체들에게 항상 적용될 수 있으며, 일부 애플리케이션은 장비의 전자파 적합성을 규제하는 2014/30/EU 지침에도 해당될 수 있다. 기계류 지침 2006/42/EC는 유럽 시장에 출시되는 안전 머신의 설계 및 구성에 대한 요구사항을 정의하고 있다. 제조업체는 적합성 신고문서(DoC: Declaration of Conformity)로 지침의 요건을 충족했음을 입증할 수 있는 경우에만, CE 라벨을 부착하고, 머신을 고객에게 인도할 수 있다.
다른 안전 표준들은 의무사항이 아니지만, 제조업체들이 기계류 지침2006/42/EC의 요건을 충족하는데 도움이 되기 때문에 이를 준수하는 것이 좋다. 예를 들어, 제조업체는 식별된 위험을 허용 가능한 잔류 위험 수준으로 줄이기 위해 ISO 12100 지침을 따를 수 있다. 또한 각 위험에 필요한 안전 레벨을 파악하고, 해당 안전 관련 기능이 정의된 요건을 충족하는지 확인하기 위해 ISO 13849 또는 IEC 62061을 사용할 수 있다. 모바일 로봇 제조업체는 특정 안전 수준을 달성하는 방법을 자체적으로 결정할 수 있다. 예를 들어, 모바일 로봇의 속도를 줄여 충돌 위험과 피해 정도를 허용 가능한 수준으로 낮출 수 있다. 또는 모바일 로봇을 사람의 접근이 금지된 분리된 구역(ISO 3691-4에 제한된 구역으로 정의)에서만 동작하도록 할 수도 있다.
올바른 표준을 식별하고, 요구사항을 구현하는 것이 모바일 제조업체가 안전한 시스템을 구축할 수 있는 최선의 방법이다. 그러나 이 과정은 상당히 복잡하고 시간이 많이 소요된다.
4. 신뢰할 수 있는 CAN 통신 보장
모바일 로봇 제조업체의 경우, 보강 시스템이나 새로운 설비의 모바일 로봇 구동 시스템에 리튬이온 배터리가 점점 더 많이 사용되면서 이를 모니터링할 수 있는 CAN 연결이 더욱 중요해지고 있다. 모바일 로봇 제조업체는 다음과 사항들을 수행해야 한다:
2. 시스템의 전자장치를 파괴할 수 있는 EMI(Electromagnetic Interference)로부터 시스템을 보호해야 한다. EMI의 위험성은 통신 케이블 옆에 배터리와 같은 새로운 구성요소들이 추가되면서 고주파 전자파 장해가 발생할 수 있기 때문에 시스템 보강 시 매우 중요하다.
머신 제어 시스템의 원격 액세스 기능을 통해 모바일 로봇 공급업체 또는 엔지니어들이 현장을 직접 방문하지 않고도 고장 수리 등 대부분의 문제를 해결할 수 있다.
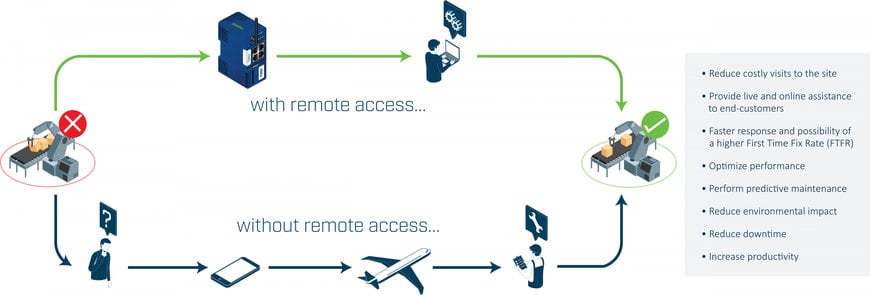
원격 액세스의 이점
문제는 IT 부서의 요구사항과 엔지니어 또는 공급업체의 요구사항 간의 균형을 맞춘 원격 액세스 솔루션을 만드는 것이다.
IT 부서는 네트워크가 안전하고, 안정적이며, 무결성을 유지하기를 원한다. 따라서 원격 액세스 솔루션에는 다음과 같은 보안 조치가 포함되어야 한다:
- 인바운드 연결 대신 아웃바운드 연결을 사용하여 방화벽에 미치는 영향을 최소화한다.
- 네트워크의 나머지 부분을 관련 트래픽과 분리한다.
- 모든 트래픽을 암호화하고 보호하여 기밀성과 무결성을 보장한다.
- 공급업체가 ISO 27001과 같은 관련 보안 표준을 준수하거나 인증을 받았는지 확인한다.
- 공급업체가 정기적인 보안 감사를 수행하도록 한다.
지금까지 살펴본 바와 같이, 모바일 로봇 제조업체는 많은 통신 및 안전 문제를 해결해야 한다. 무선 연결을 설정하고, 다른 네트워크를 통해 데이터를 전송할 수 있어야 하며, 안전은 물론, CAN 시스템과의 연결을 보장하고, 로봇에 원격으로 안전하게 액세스할 수 있어야 한다. 또한 더욱 복잡한 점은 각 시설들이 현장의 요구사항을 충족할 수 있도록 재평가 및 조정이 이뤄져야 한다는 것이다.
모바일 로봇의 통신 구현을 위한 모범사례
모바일 로봇 제조업체는 대부분 통신이나 안전 전문가가 아니다. 따라서 자체적으로 요구되는 통신 기술을 시도하고 개발하는데 많은 시간과 비용이 소모될 수 있다. 용도에 맞게 구현된 타사 통신 솔루션을 사용하면, 당면한 통신 문제를 해결하는 것은 물론, 다른 이점들도 얻을 수 있다.
최신 통신 솔루션은 모바일 제조 업체들이 하나의 표준이나 프로토콜용으로 설계된 네트워킹 제품을 사용하는 대신, 머신의 다른 부분에 영향을 미치지 않으면서 다른 표준이나 프로토콜용으로 설계된 제품으로 쉽게 대체할 수 있는 모듈식 설계로 제공된다. 예를 들어, 블루투스는 어떤 시설에는 가장 적합한 무선 표준일 수 있지만, 다른 시설에서는 와이파이가 더 나은 커버리지를 제공할 수 있다. 마찬가지로, 어떤 현장에서는 PROFINET 및 PROFIsafe 프로토콜을 사용할 수 있고, 다른 현장에서는 다른 산업용 및 안전 프로토콜을 사용할 수 있다. 모듈식으로 설계된 통신 제품을 이용하면, 모바일 로봇 제조업체는 이러한 두 시나리오에서 모두 하드웨어 설계를 변경하지 않고도 로컬 요건에 부합하는 네트워킹 기술로 변경할 수 있다.
저자:
마크 크로슬리(Mark Crossley), 다니엘 하인츨러(Daniel Heinzler), 프레드릭 브라이놀프(Fredrik Brynolf), 토마스 칼슨(Thomas Carlsson)
HMS 네트웍스
HMS 네트웍스(HMS Networks)는 스웨덴 기반의 산업용 통신 전문 기업으로 AGV 통신을 위한 다양한 솔루션을 제공하고 있다. 자세한 정보는 www.hms-networks.com/agv에서 확인할 수 있다.
